สำหรับคำถามที่ว่า "อิมพีแดนซ์คืออะไร" ฉันจะสังเกตได้ว่าอิมพีแดนซ์เป็นแนวคิดคร่าวๆของฟิสิกส์โดยทั่วไปซึ่งอิมพีแดนซ์ทางไฟฟ้าเป็นเพียงตัวอย่างเดียวเท่านั้น
เพื่อให้เข้าใจถึงความหมายและวิธีการทำงานมักจะง่ายต่อการพิจารณาความต้านทานทางกลแทน คิดว่าพยายามดัน (สไลด์) โซฟาขนาดใหญ่ข้ามพื้น
คุณใช้แรงในระดับหนึ่งและโซฟาเลื่อนด้วยความเร็วที่แน่นอนทั้งนี้ขึ้นอยู่กับว่าคุณกดหนักแค่ไหนน้ำหนักของโซฟาประเภทของพื้นผิวประเภทของเท้าที่โซฟามีและอื่น ๆ สำหรับสถานการณ์นี้เป็นไปได้ที่จะกำหนดอิมพีแดนซ์เชิงกลที่ให้อัตราส่วนระหว่างความยากในการกดและความรวดเร็วของโซฟา
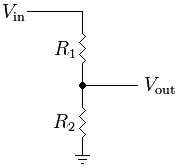
นี่เป็นเหมือนวงจรไฟฟ้ากระแสตรงซึ่งคุณใช้แรงดันไฟฟ้าจำนวนหนึ่งกับวงจรและกระแสไฟฟ้าในอัตราที่สอดคล้องกัน
สำหรับกรณีของทั้งโซฟาและวงจรการตอบสนองต่ออินพุตของคุณอาจเป็นเรื่องง่ายและเป็นเส้นตรง: ตัวต้านทานที่ทำตามกฎของโอห์มที่อิมพีแดนซ์ทางไฟฟ้าเป็นเพียงความต้านทานและโซฟาอาจมีเท้าเลื่อนแรงเสียดทานที่อนุญาต เพื่อเคลื่อนที่ด้วยความเร็วตามสัดส่วนกับแรงของคุณ *
วงจรและระบบกลไกอาจไม่เชิงเส้น หากวงจรของคุณประกอบด้วยแรงดันไฟฟ้าที่เปลี่ยนแปลงของตัวต้านทานแบบอนุกรมที่มีไดโอดกระแสจะใกล้ศูนย์จนกว่าคุณจะเกินแรงดันไปข้างหน้าของไดโอดที่กระแสจุดนั้นจะเริ่มไหลผ่านตัวต้านทานตามความต้านทานของโอห์ม กฎหมาย. ในทำนองเดียวกันโซฟาที่นั่งอยู่บนพื้นมักจะมีระดับของแรงเสียดทานสถิต: มันจะไม่เริ่มเคลื่อนที่จนกว่าคุณจะกดด้วยแรงเริ่มต้นจำนวนหนึ่ง ไม่ว่าระบบเครื่องกลหรือไฟฟ้าจะมีความต้านทานเชิงเส้นเดียวที่สามารถกำหนดได้ สิ่งที่ดีที่สุดที่คุณสามารถทำได้คือการกำหนดอิมพีแดนซ์แยกกันภายใต้เงื่อนไขที่ต่างกัน (โลกแห่งความจริงนั้นเป็นแบบนี้มากขึ้น)
แม้ว่าสิ่งต่าง ๆ จะมีความชัดเจนและเป็นเส้นตรงสิ่งสำคัญคือต้องทราบว่าความต้านทานเพียงอธิบายอัตราส่วน - มันไม่ได้อธิบายถึงขีด จำกัด ของระบบและมันก็ไม่ "เลวร้าย" คุณสามารถรับกระแส / ความเร็วได้มากเท่าที่คุณต้องการ (ในระบบในอุดมคติ) โดยเพิ่มแรงดัน / แรงกดให้มากขึ้น
ระบบกลไกยังสามารถให้ความรู้สึกที่ดีสำหรับความต้านทานกระแสสลับ ลองนึกภาพว่าคุณกำลังขี่จักรยาน ในแต่ละครึ่งรอบของคันเร่งคุณกดซ้ายผลักไปทางขวา นอกจากนี้คุณยังสามารถจินตนาการถึงการถีบด้วยเท้าเพียงหนึ่งเท้าและคลิปหนีบนิ้วเท้าซึ่งคุณสามารถผลักและดึงได้ด้วยการเหยียบทุกรอบ นี่เป็นเหมือนการใช้แรงดันไฟฟ้ากระแสสลับกับวงจร: คุณกดและดึงในทางกลับกันตามรอบความถี่ที่กำหนด
หากความถี่ช้าพอ - เช่นเมื่อคุณหยุดจักรยานปัญหาของการเหยียบคันเร่งเป็นเพียงปัญหา "dc" เช่นดันโซฟา เมื่อคุณเร่งความเร็ว แต่สิ่งต่าง ๆ อาจทำหน้าที่แตกต่างกันไป
ทีนี้สมมติว่าคุณกำลังขี่จักรยานไปด้วยความเร็วที่แน่นอนและจักรยานของคุณคือความเร็วสามระดับด้วยอัตราส่วนเกียร์ต่ำกลางและสูง Medium ให้ความรู้สึกเป็นธรรมชาติเกียร์สูงเป็นเรื่องยากที่จะใช้กำลังมากพอที่จะสร้างความแตกต่างและเมื่อใช้เกียร์ต่ำคุณแค่หมุนแป้นโดยไม่ต้องถ่ายโอนพลังงานใด ๆ ไปยังล้อ นี่เป็นเรื่องของการจับคู่อิมพีแดนซ์ซึ่งคุณสามารถถ่ายโอนอำนาจไปยังล้อได้อย่างมีประสิทธิภาพเมื่อพวกมันมีความต้านทานทางกายภาพจำนวนหนึ่งที่เท้าของคุณ - ไม่มากเกินไปไม่น้อยเกินไป ปรากฏการณ์ทางไฟฟ้าที่สอดคล้องกันเป็นเรื่องธรรมดามากเช่นกัน; คุณต้องมีอิมพิแดนซ์ที่จับคู่กันเพื่อส่งพลังงาน RF ได้อย่างมีประสิทธิภาพจากจุด A ไปยังจุด B และทุกครั้งที่คุณเชื่อมต่อสองสายส่งเข้าด้วยกันจะมีการสูญเสียที่ส่วนต่อประสาน
ความต้านทานที่คันเหยียบให้กับเท้าของคุณนั้นเป็นสัดส่วนกับความยากลำบากของคุณกดซึ่งสัมพันธ์กับความต้านทานแบบง่ายที่สุดโดยเฉพาะอย่างยิ่งที่ความเร็วต่ำ แม้ในวงจร AC ตัวต้านทานจะทำตัวเหมือนตัวต้านทาน (จนถึงจุดหนึ่ง)
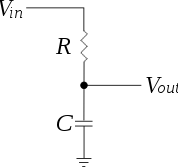
อย่างไรก็ตามแตกต่างจากตัวต้านทานความต้านทานของจักรยานขึ้นอยู่กับความถี่ สมมติว่าคุณใส่จักรยานของคุณในเกียร์สูงเริ่มจากหยุด มันอาจเป็นเรื่องยากมากในการเริ่มต้น แต่เมื่อคุณเริ่มต้นแล้วอิมพีแดนซ์ที่นำเสนอโดยคันเหยียบจะลดลงเมื่อคุณเดินเร็วขึ้นและเมื่อคุณเดินเร็วมากคุณอาจพบว่าคันเหยียบมีอิมพีแดนซ์น้อยเกินไปที่จะดูดซับพลังงานจากเท้าของคุณ จริงๆแล้วมีอิมพีแดนซ์ที่ขึ้นกับความถี่ ( ปฏิกิริยา ) ที่เริ่มสูงและลดลงเมื่อคุณมุ่งหน้าไปยังความถี่ที่สูงขึ้น
นี่เป็นพฤติกรรมของตัวเก็บประจุและแบบจำลองที่ดีสำหรับความต้านทานเชิงกลของจักรยานจะเป็นตัวต้านทานในแบบขนานกับตัวเก็บประจุ
ที่ dc (ศูนย์ความเร็ว) คุณจะเห็นความต้านทานสูงและคงที่เป็นอิมพีแดนซ์ของคุณ เมื่อความถี่ในการถีบเพิ่มขึ้นอิมพิแดนซ์ของตัวเก็บประจุจะต่ำกว่าของตัวต้านทานและทำให้กระแสไหลผ่านได้
แน่นอนว่ามีชิ้นส่วนไฟฟ้าอื่น ๆ อีกมากมายและการเปรียบเทียบเชิงกลเชิงกล ** แต่การสนทนานี้ควรให้คุณมีสัญชาตญาณเบื้องต้นเกี่ยวกับแนวคิดทั่วไปเพื่อให้มีเหตุผล (ปุนตั้งใจ) ในขณะที่คุณเรียนรู้เกี่ยวกับลักษณะทางคณิตศาสตร์ของเวลาที่ดูเหมือน เหมือนวิชานามธรรม
* คำที่จู้จี้จุกจิก: กฎของโอห์มไม่เคยถูกต้องสำหรับอุปกรณ์จริงและแรงเสียดทานในโลกแห่งความเป็นจริงไม่เคยให้ความเร็วตามสัดส่วนที่แน่นอน อย่างไรก็ตาม "เส้นตรงที่เป็นธรรม" นั้นง่าย ฉันพยายามที่จะเป็นทางการศึกษาและทุกสิ่งที่นี่ ลดความหย่อนลงให้ฉันหน่อย
ตัวอย่างเช่นตัวเหนี่ยวนำคือสิ่งที่เหมือนกับลูกกลิ้งสปริงที่ล้อของคุณซึ่งเพิ่มการลากเมื่อคุณได้รับความถี่สูงขึ้น)