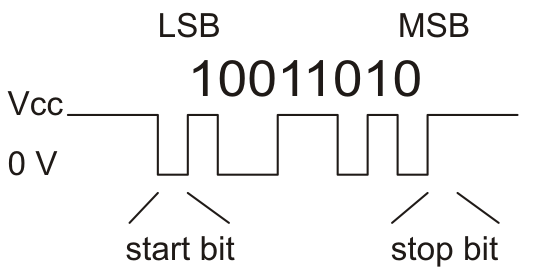
ฉันพยายามค้นหาคำอธิบายที่ดีของอนุกรม TTL "มาตรฐาน" โดยไม่มีโชคมาก ฉันเข้าใจว่าการส่งสัญญาณแบบอนุกรม (TX) และรับ (RX) สายไม่ได้ใช้งานสูง (ที่ VCC) และพวกเขาลดลงถึงพื้นเมื่อส่งบิต เช่นนี้พวกเขากลับด้านจากบรรทัดฐานที่ "1" สูงและ "0" ต่ำ
สิ่งที่ฉันไม่เข้าใจคือผู้ที่รับผิดชอบในการถือสายสูงและวิธีการส่งเป็นศูนย์ ผู้ส่งขับสายไปที่สูงหรือต่ำหรือไม่? หรือผู้รับรับสายสูงด้วยผู้ส่งดึงสายต่ำ (เปิดสะสม)?
อ่านคำตอบของ Joby เห็นได้ชัดว่าทุกสิ่งที่ฉันคิดว่าฉันรู้คือคว่ำ :-)
—
blalor
Real RS232 เป็นวิธีอื่น ๆ รอบ ๆ 0 = 12v, 1 = -12v, นั่นเป็นสาเหตุที่ทำให้เกิดความสับสน
—
Toby Jaffey
จุดคำศัพท์: "อนุกรม TTL" เป็นคำที่กว้างเกินไป "ซีเรียลแบบอะซิงโครนัส (จากจุดหนึ่งไปยังอีกจุด) (ที่ระดับ TTL)" ดูเหมือนจะเป็นสิ่งที่คุณกำลังถาม (แม้ว่ามันอาจจะยังขาดอยู่ แต่อย่างน้อยก็ดีกว่า)
—
นิค T
@ Nick ชนิด OP หมายถึงคือสิ่งที่จะป้อนเข้า MAX232 ที่ฉันจะเรียกว่า "RS232 ในระดับ TTL"
—
Toby Jaffey
@Joby - ถ้าเขาใช้เพียง Tx และ Rx และคุณลบระดับของมันออกไปก็ไม่มีอะไรที่เกี่ยวกับเรื่องนี้อีกต่อไป! เรียกว่า UART
—
stevenvh